How to run the 'Noise Filtering' analytics
This analytic scans the point cloud and classifies atmospheric points deemed to be noise.
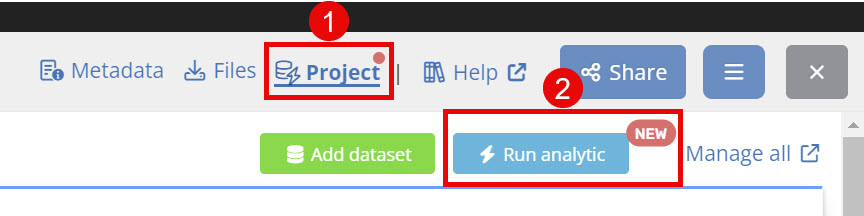
- In the 'Project' (1) tab under the viewer, click 'Run analytic' (2) button.
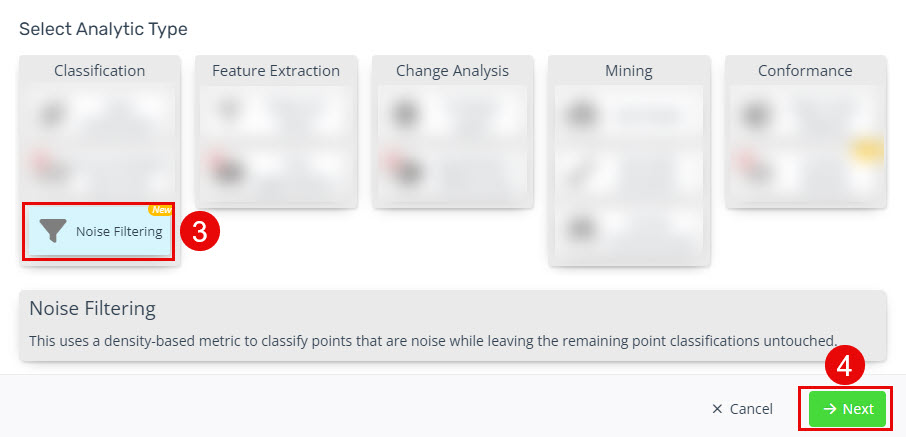
- Select 'Noise Filtering' (3) and click 'Next' (4).
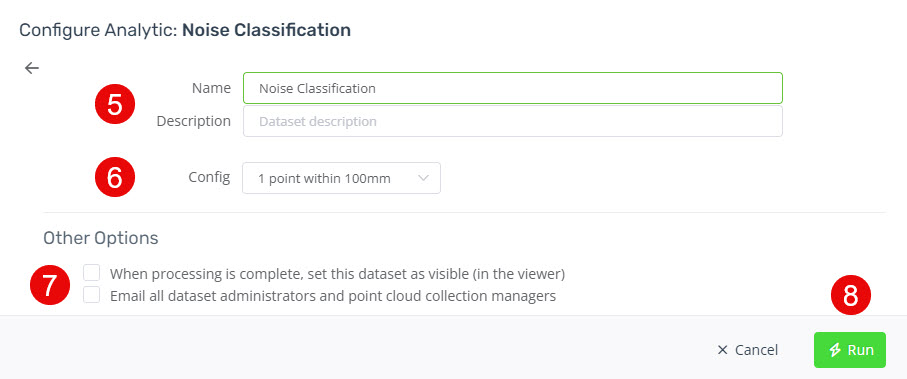
- Rename (5) the analytic if necessary and choose your desired configuration (6). See below the typical configs that are available. If you require a custom configuration, please contact our support team.
- 1 point within 100mm
A filtering condition where a point must a have another point within 100mm to be considered not noise.
-
3 points within 100mm
Better for filtering spurious scan lines from a slam laser. The filtering is where a point must have 3 neighbours within 100mm to be considered not noise
- 1 point within 100mm
Choose other options (7) and click Run' (8).
You will received an email confirmation that the analytic has completed and you'll need to reload the web page to see the changes.
See here on how to view the classification.