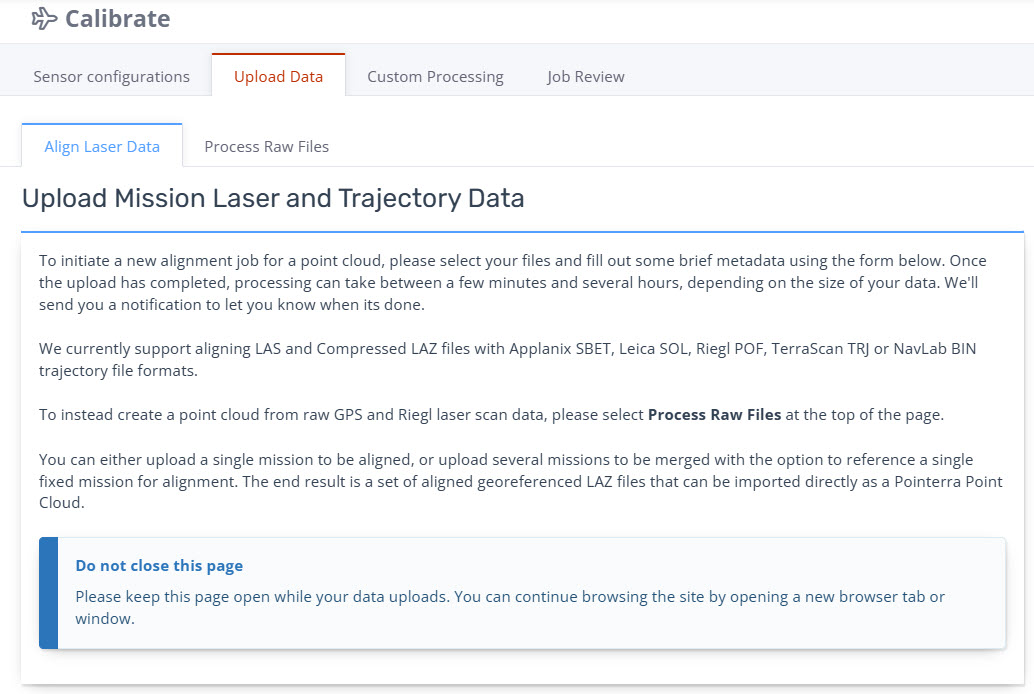
Calibration: Align Laser Data Individual Missions
The Align Laser Data workflow is designed for users who wish to use their own airborne GPS processing and raw lidar extraction. Users upload a trajectory file and the LAS/LAZ files.
Preparing the Source Files
-
Trajectory: - We accept Applanix SBET (.out), Leica SOL, Riegl POF, TerraScan TRJ or NavLab BIN trajectory file formats.
-
Notes:
Applanix SBET, Leica SOL, Riegl POF and NavLab BIN needs to be in Geodetic.
TerraScan TRJ needs to be in Projected.
-
-
Point Cloud Files: - LAS or compressed LAZ files
We recommend the point cloud data be in projected coordinates to maintain precision.
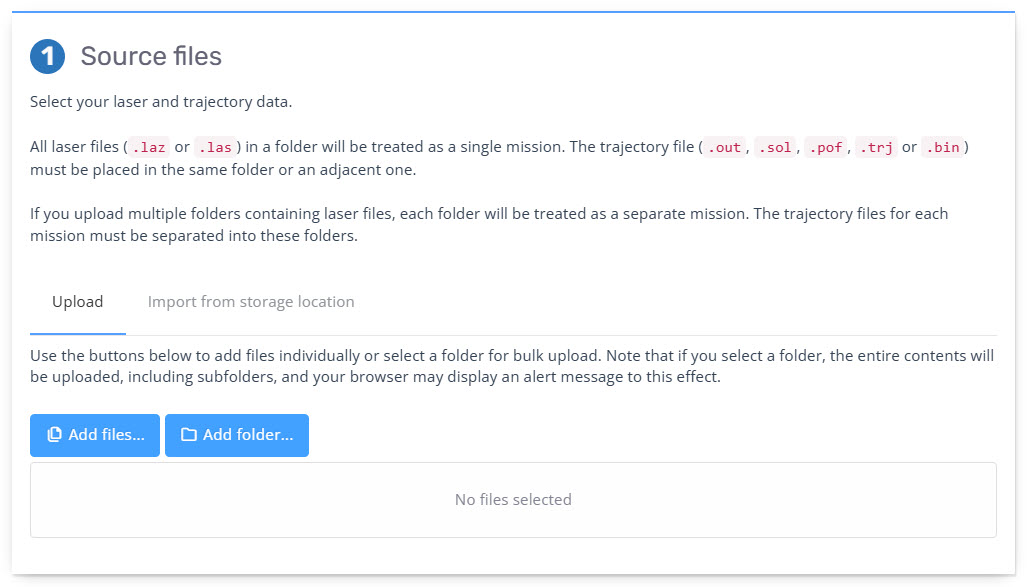
Source Files
Select the 'Add files' button to add your trajectory file and the LAS/LAZ files. Alternatively you can select the folders separately.
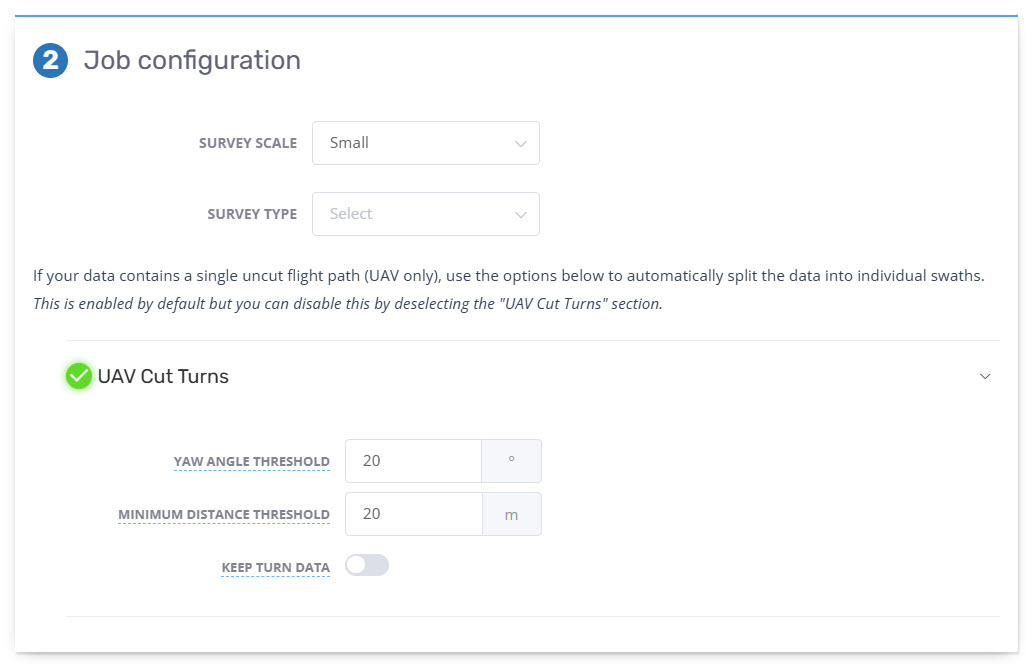
Job Configuration
-
From the drop-down select the pre-entered Survey Scale that applies to the survey.
If 'Small' is chosen it is assumed these are a continuous LAS/LAZ file requiring cutting at the turns
-
From the drop-down select the applicable Survey Type for the raw sensor data being uploaded. These options define the parameters utilized in the 'Strip alignment' stage. Options are:
Corridor - for utility or transportation type corridors where overlap between strips is limited.
Block - for block collection where the bulk of strips have significant overlap with adjacent strips (based on the planned strip overlap).
-
UAV Cut Turns - This is available if the aircraft type is set to UAV in the sensor config. As UAV captures are generally small, the capture from LiDAR sensors remain on as the turns are too short for the system to stop collecting in that short time period. As a result the RXP files will be one continuous capture and not split. These options allow for the lidar data to be cut into strips.
Yaw Angle Threshold - The flight will be cut whenever the aircraft turns with a heading change greater than the number entered. Default is 20 Degrees.
Minimum Distance Threshold - This specifies the minimum distance for a flight line and allows shorter trajectory segments to be dropped. Default is 20 metres. We recommend increasing this to what is expected to be the shortest flight line.
Keep Turn Data - Choose whether to keep or discard data during turns. Please note that keeping this data is likely to cause self-overlap.
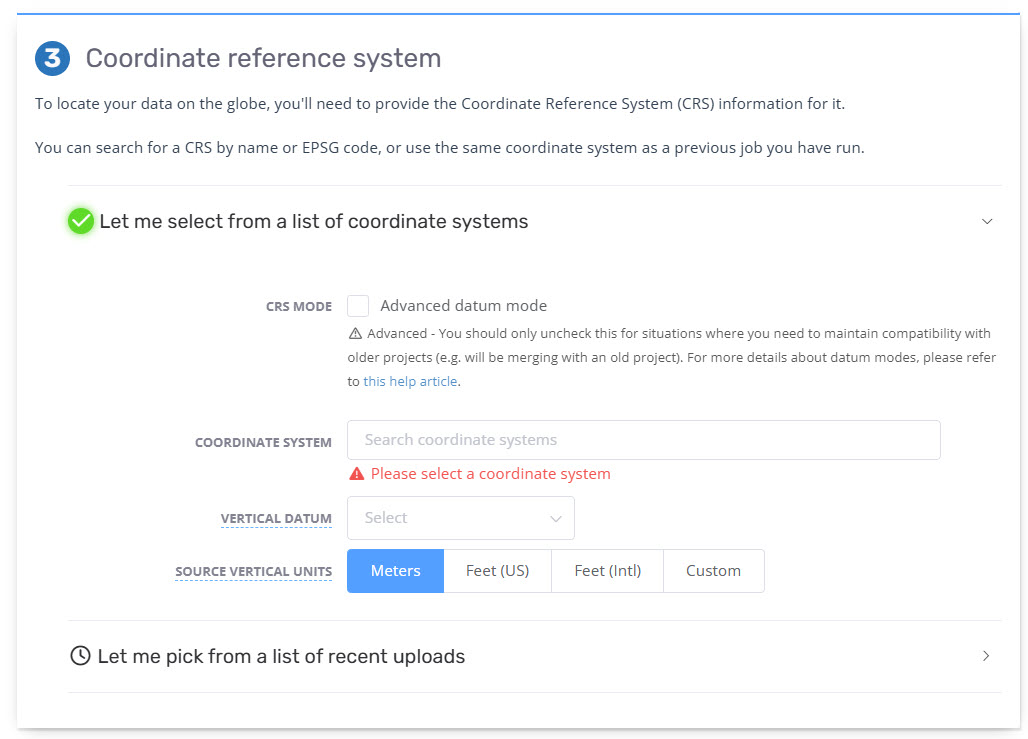
Source coordinate system
The selection of accurate coordinate systems is critical for ensuring the final generated point cloud is in the desired coordinate system once it is converted to the Pointerra format and visible in the Viewer.
-
From the list of options:
CRS Mode - Either enable/disable the Advanced Datum Mode (some users may not see this option as your account will be using Advanced Datum Mode by default.)
Source Coordinate System - enter the desired coordinate by name or EPSG code - this is the coordinate system that the point cloud (LAZ format) is generated in. We recommend projected coordinate system.
Horizontal Datum - select from the available options in the drop down based on geographical location - this defines both horizontal datum of the GPS trajectory and the incoming base station data coordinates (it is expected that the coordinates are in the same datum).
Vertical Datum - select from the available options in the drop down based on geographical location - this defines the vertical datum of the generated point cloud either as Ellipsoidal or Orthometric (based on the selected geoid).
Source Vertical Units - select from the available options and should match the 'Source Coordinate System'.
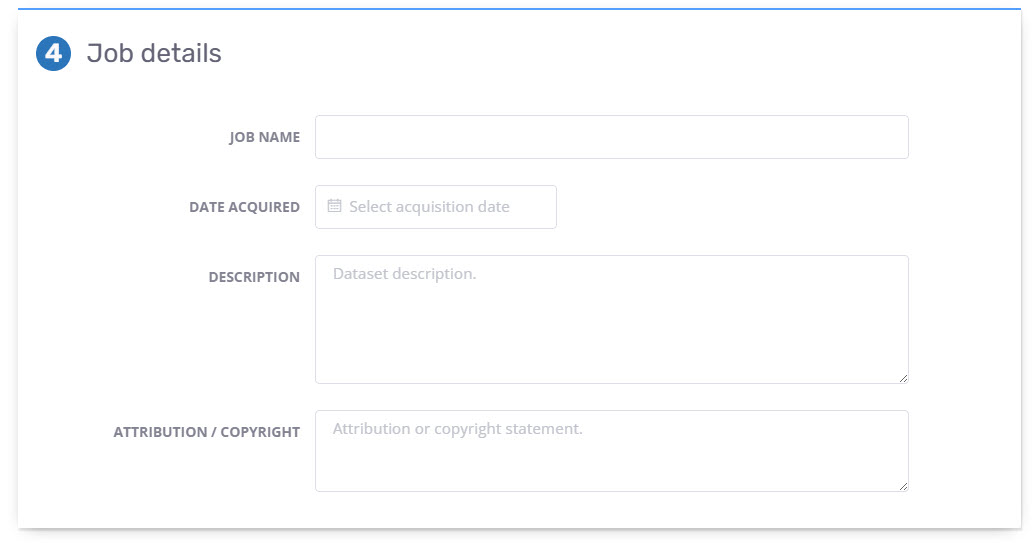
Job details
Enter applicable metadata information pertaining to the uploaded raw sensor data.
Job Name will flow through to the name of the constructed point cloud in the Viewer.
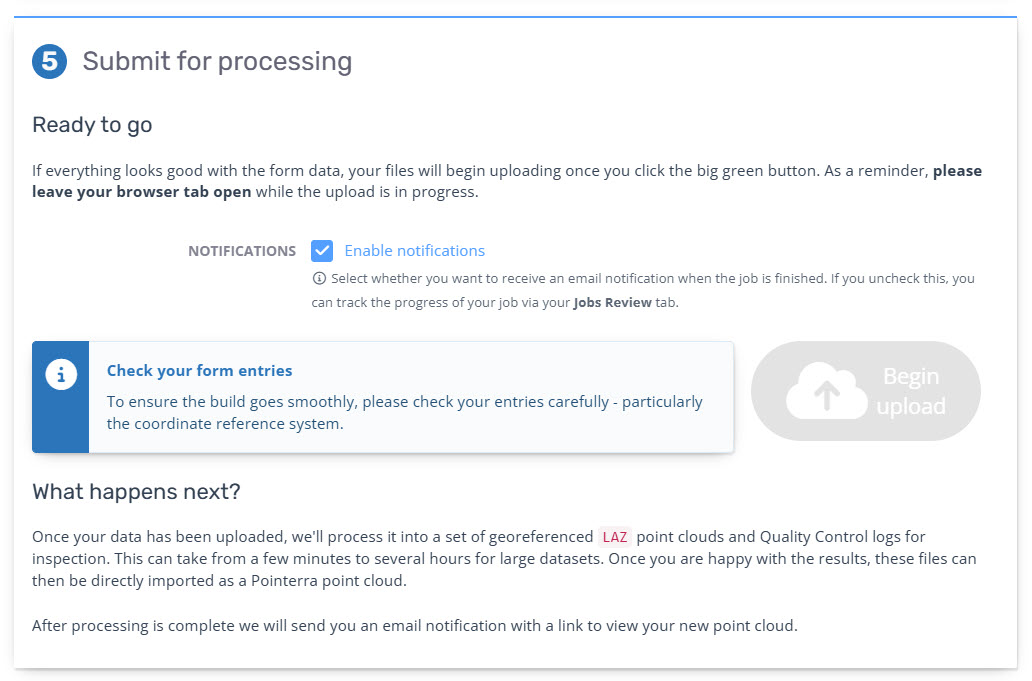
Submit for processing
If all inputs are correct select Begin upload to commence the upload.
If left selected an email will be sent to the user uploading the data at completion of upload into Pointerra.
Once upload is complete the page will automatically reload to the "Job Review" page and automatically trigger the processing workflow. See Monitoring Processing status (Individual Mission Jobs)
Locations on the upload page will be flagged if information is missing prior to allowing upload.